La conférence FARI de Bruxelles revient les 23 et 24 novembre, découvrez-en plus !
Une initiative de
Soutenu par


Transmissions compactes pour la robotique moderne : Analyse
JUIL. 2025
Transmissions compactes pour la robotique moderne : Analyse
Auteurs:
Résumé
À la veille de l’intégration de l’interaction homme-robot (HRI) dans notre vie quotidienne, les performances des dispositifs robotiques dédiés à la HRI restent fortement conditionnées par leurs transmissions. Dans la plupart des robots industriels, on retrouve généralement deux technologies de transmission relativement peu conventionnelles — les Harmonic Drives© et les Cycloid Drives — qui ne sont pas aussi largement utilisées dans d’autres secteurs. Comprendre l’origine de cette singularité offre des pistes précieuses dans la recherche de technologies de transmission robotique adaptées aux besoins futurs.
Dans cet article, nous proposons un cadre d’évaluation fortement orienté vers les applications HRI, que nous utilisons pour analyser les performances des technologies de transmission robotiques classiques et émergentes, dans lesquelles les critères de conception sont largement orientés vers des aspects tels que le poids et le rendement. Ce cadre propose d’utiliser la puissance virtuelle comme méthode pertinente pour évaluer les limitations intrinsèques des technologies de transmission dans leur capacité à atteindre de hauts rendements.
Cet article complète les travaux existants portant sur l’interaction complexe entre les technologies de transmission et les actionneurs, en adoptant une nouvelle perspective centrée sur la transmission, avec un accent particulier sur les applications HRI.

Contributeurs

Partager
Autres publications

Date
MAI 2026
Chercheurs
Journal Article
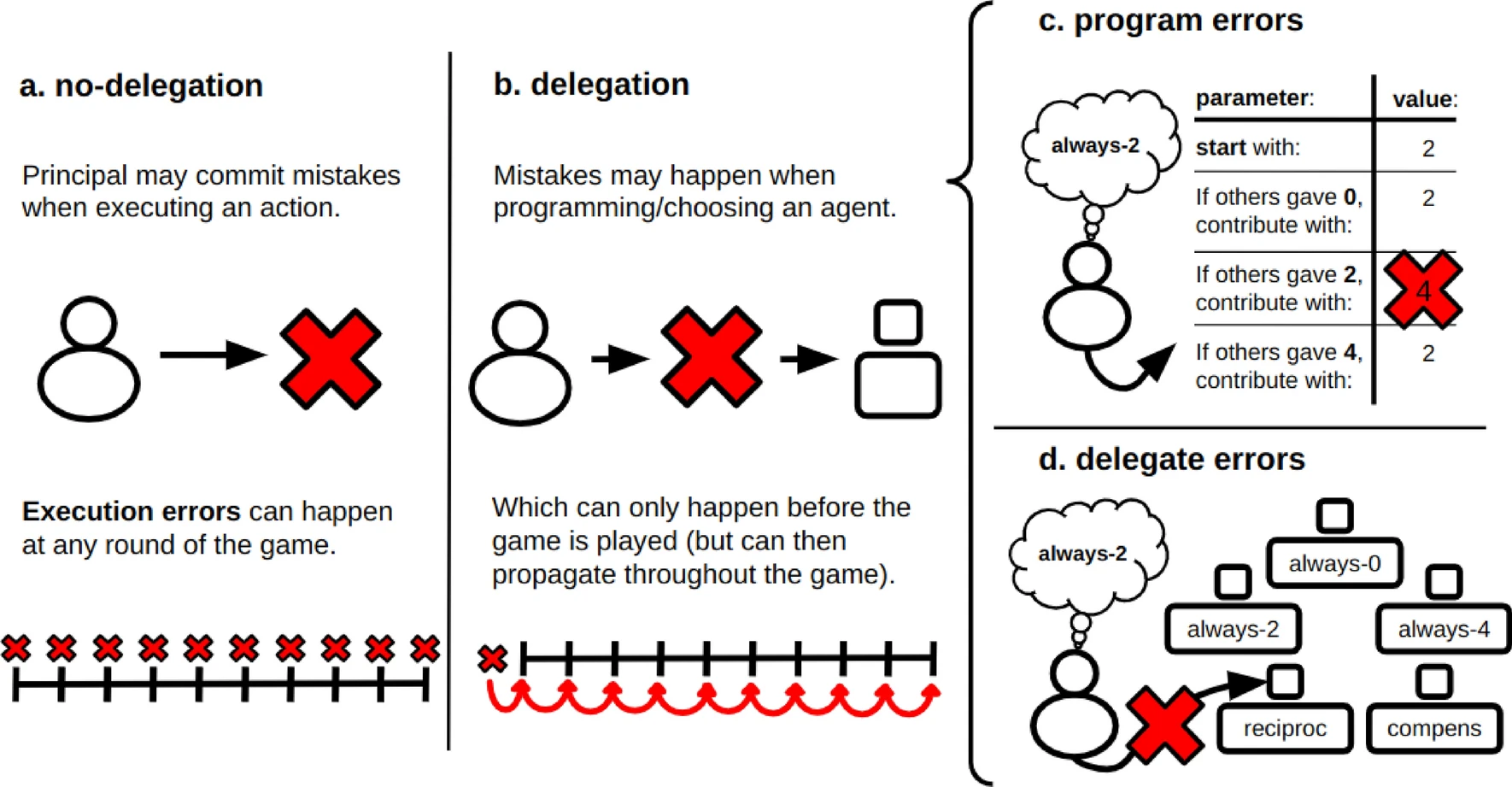
Committing to the wrong artificial delegate in a collective-risk dilemma is better than directly committing mistakes
Date
AOÛT 2024
Chercheurs

Conference Proceeding
The Role of Robotics in Achieving the United Nations Sustainable Development Goals
Date
MARS 2022
Chercheurs

Date
MAI 2026
Chercheurs

Journal Article
R2poweR: The Proof-of-Concept of a Backdrivable, High-Ratio Gearbox for Human-Robot Collaboration
Date
JUIL. 2025
Chercheurs