La conférence FARI de Bruxelles revient les 23 et 24 novembre, découvrez-en plus !
Une initiative de
Soutenu par


Facteurs influençant la rétroconduite de l'actionneur dans la robotique centrée sur l'homme
JUIL. 2025
Facteurs influençant la rétroconduite de l'actionneur dans la robotique centrée sur l'homme
Auteurs: Pablo Lopez Garcia, Elias Saerens, Stein Crispel, Anand Varadharajan, Dirk Lefeber, and Tom Verstraten
Résumé
La robotique centrée sur l’humain vise à utiliser des dispositifs robotiques pour améliorer notre vie. Rien qu’en Europe, environ 650 000 personnes vivent avec des amputations de membres, 40 millions ont des emplois avec un risque élevé de blessures lombaires, et 40 millions ont plus de 80 ans. À l’échelle mondiale, les prothèses actives, les exosquelettes et les robots de service pourraient aider à améliorer la vie de ces personnes. Cependant, leur adoption est malheureusement fortement freinée par des limitations technologiques dans les actionneurs alimentant ces dispositifs.
La retrodraivabilité (backdrivability) caractérise la capacité d’un actionneur à être entraîné depuis le côté de la charge, et c’est une propriété cruciale pour permettre des dispositifs robotiques centrés sur l’humain performants. Dans cet article, nous décrivons les facteurs sous-jacents qui déterminent la retrodraivabilité d’un actionneur en robotique, et nous étudions des lois d’échelle appropriées pour comprendre comment ces facteurs sont conditionnés par la sélection du moteur et de la transmission, ainsi que par le cycle opérationnel spécifique d’un dispositif robotique. Cette analyse révèle la complexité et les défis rencontrés pour modéliser et prédire avec précision ce phénomène complexe, contredisant une hypothèse largement répandue dans la communauté robotique selon laquelle les transmissions à faible rapport sont la meilleure stratégie pour construire des actionneurs retrodraivables et légers.

Contributeurs

Partager
Autres publications

Journal Article
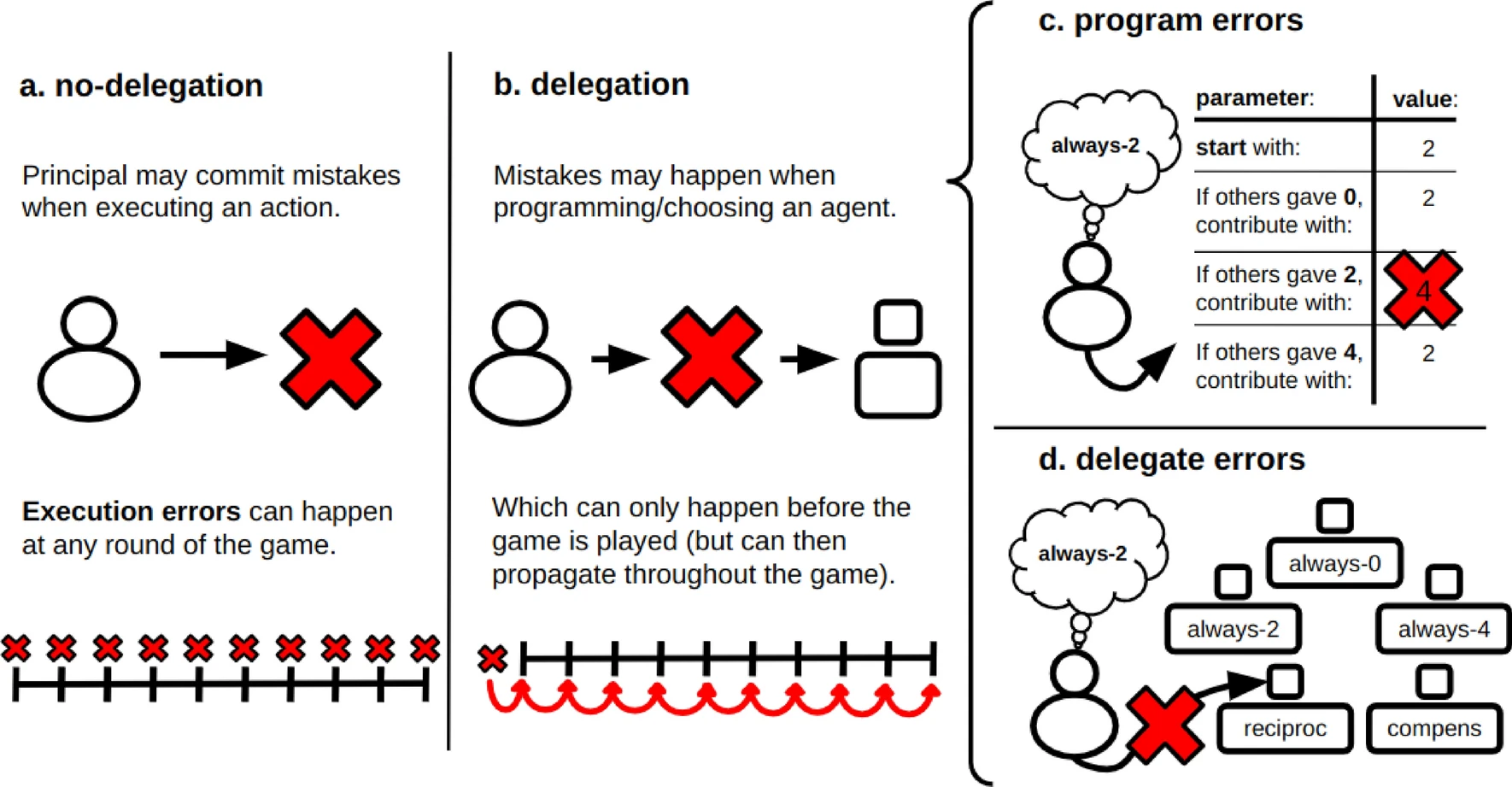
Committing to the wrong artificial delegate in a collective-risk dilemma is better than directly committing mistakes
Date
AOÛT 2024
Chercheurs


Date
SEPT. 2024
Chercheurs

Journal Article
Assessing Responsibility in Digital Solutions that operate with or without AI - A Review for Policymakers
Date
AVR. 2024
Chercheurs