The FARI Brussels Conference returns on 23 and 24 November, find out more!
An Initiative of
Supported by

R2poweR: The Proof-of-Concept of a Backdrivable, High-Ratio Gearbox for Human-Robot Collaboration
JUL 2025
R2poweR: The Proof-of-Concept of a Backdrivable, High-Ratio Gearbox for Human-Robot Collaboration
Authors: P. L. Garcia, S. Crispel, A. Varadharajan, E. Saerens, T. Verstraten, B. Vanderborght, D. Lefeber
Abstract
Robotic engineers face major challenges to solve the complex actuation needs of Human-Robot Collaboration with existing act robotic gearboxes. Available technologies comprise high-ratio Planetary Gearheads, Cycloid Drives and Harmonic Drives, inherited from conventional industrial robotics. Alternative approaches include Direct-Drive and Quasi Direct-Drive actuation strategies, which propose to cancel or substantially reduce gear ratio, in order to minimize reflected inertia and attain enough backdrivability for collaborative tasks. This paper presents the proof-of-concept validation of a novel high-ratio, Wolfrom-based, gearbox technology that follows a different approach to attain the same objective. Testing five different gearbox prototypes, we confirm the ability of the R2poweR technology to improve efficiency and backdrivability while retaining the weight and control advantages derived from the use of high reduction ratios. The result is a highly efficient, backdrivable, high-ratio gearbox with exciting Huma-Robot Collaboration potential.


Contributors

Share
Other publications

Journal Article
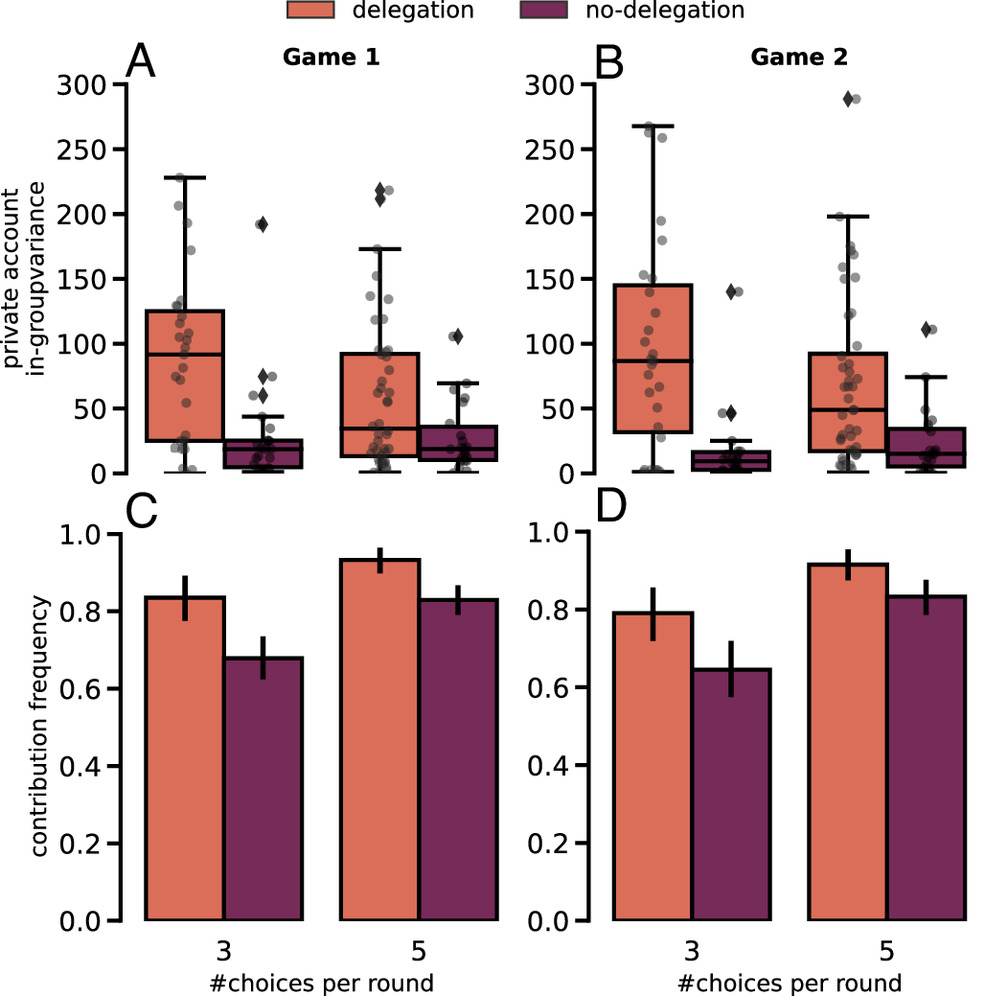
Humans program artificial delegates to accurately solve collective-risk dilemmas but lack precision
Date
JUL 2025
Researchers

Journal Article
Assessing Responsibility in Digital Health Solutions that operate with or without AI - 3 Phase Mixed Methods Study
Date
APR 2024
Researchers

Journal Article
Fast deliberation is related to unconditional behaviour in iterated Prisoners’ Dilemma experiments
Date
NOV 2022
Researchers
Date
JUN 2025
Researchers