The FARI Brussels Conference returns on 23 and 24 November, find out more!
An Initiative of
Supported by


A Novel Wolfrom-Based Gearbox for Robotic Actuators
JUL 2025
A Novel Wolfrom-Based Gearbox for Robotic Actuators
Authors: Bram Vanderborght
Abstract
In many robotic applications, high torque density and highly efficient actuators are required to handle the high torque motion without hampering mobility through excessive weight and footprint. Traditionally, engineers designing actuators for these types of applications use high-speed electrical motors in combination with high-ratio speed reducers such as harmonic and cycloid drives or lever arms in order to achieve the required torques. However, these systems are not ideal since they suffer from one or more of the following limitations: high cost, load hysteresis, nonlinear behavior, and torque ripple. An alternative to achieving the required torque increase is using an interesting type of compound planetary gear trains (C-PGTs). In this article, a novel type of such a C-PGT, based on the Wolfrom topology, is presented. An extra degree of freedom is created, which can be used to increase the performance of the overall gearbox, i.e., increase its efficiency, reduce its inertia, increase its torque capability, etc. This modified Wolfrom is discussed in detail by deriving a general framework for the design of such a transmission system. This framework consists of listing the specific fitting conditions for such a Wolfrom planetary gear train, the derivation of an efficiency model based on the Rolling Power concept, and a load analysis to determine the weakest gearing element. Finally, a prototype is built to demonstrate the design framework and the feasibility of the Wolfrom variant. Additionally, the trend of the efficiency model is confirmed.


Contributors

Share
Other publications


Journal Article
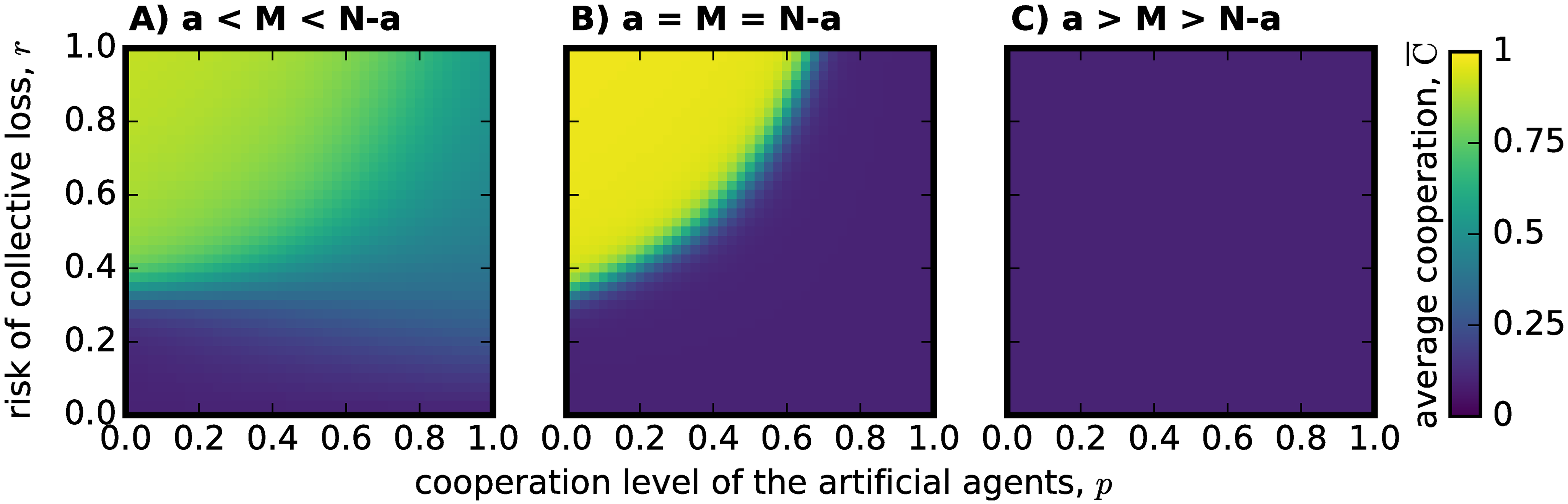
Delegation to artificial agents fosters prosocial behaviors in the collective risk dilemma
Date
MAY 2022
Researchers

Date
MAY 2026
Researchers
Date
AUG 2024
Researchers

Date
MAR 2024
Researchers